Yin Zhou et Oncel Tuzel, deux scientifiques travaillant chez Apple ont publié sur ArXiv.org leurs recherches détaillées consacrées à VoxelNet. Il s'agit d'un logiciel chargé d’analyser les données des radars tridimensionnels LIDAR (détection par laser) afin de détecter avec davantage de précision ce qui entoure le véhicule.
Cette publication a surpris les chercheurs et observateurs, d'autant plus qu'elle a été partagée sur ArXiv et non sur le blog d'Apple consacré au machine learning. La conduite autonome est un véritable enjeu pour de nombreux acteurs du secteur. Ce type de système repose sur des capteurs spécifiques, les radars LiDAR, et sur des caméras plus conventionnelles. La combinaison des deux permet d'améliorer la détection et la reconnaissance des éléments 3D (objets, personnes, etc.) autour du véhicule.
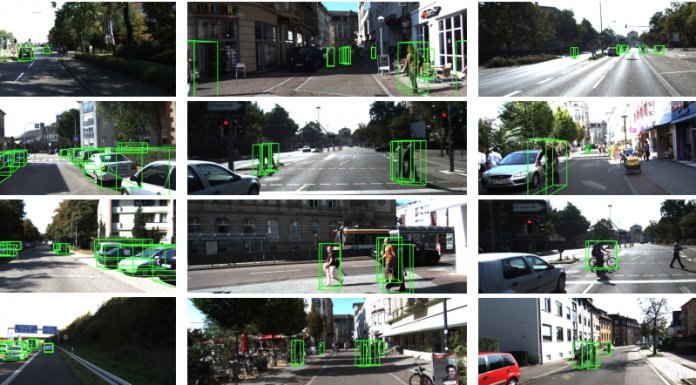
Conduite autonome: Deux chercheurs d'Apple dévoilent leurs travaux sur la détection et reconnaissance d'objets 3D
Sur le même sujet
L'Hebdo ActuIA
Inscription confirmée, à très vite !