
À travers un communiqué sur son site internet, l’Université de Zurich (UZH) a dévoilé DroNet, un réseau de neurones convolutifs permettant aux drones de circuler de manière autonome au milieu du trafic urbain.
Les chercheurs de l'UZH ont collaboré avec le Pôle de recherche national (PNR) Robotique pour développer DroNet en se basant sur des techniques de deep learning. L'algorithme a été entraîné sur une importante base de données regroupant des scènes et séquences de circulations, notamment de vélos et voitures, en milieu urbain.
 UZH[/caption]
Source: A.Loquercio, A.I. Maqueda, C.R. Del Blanco, D. Scaramuzza "DroNet: Learning to Fly By Driving IEEE Robotics and Automation Letters" (RA-L), 2018 PDF: ici
Site du projet, logiciel et datasets: http://rpg.ifi.uzh.ch/dronet.html
Recherches sur le deep learning: ici
UZH[/caption]
Source: A.Loquercio, A.I. Maqueda, C.R. Del Blanco, D. Scaramuzza "DroNet: Learning to Fly By Driving IEEE Robotics and Automation Letters" (RA-L), 2018 PDF: ici
Site du projet, logiciel et datasets: http://rpg.ifi.uzh.ch/dronet.html
Recherches sur le deep learning: ici
"Les drones apprennent non seulement à naviguer dans les rues de la ville, mais aussi dans des environnements complètement différents, où ils n’ont jamais appris à le faire, tels que les parkings et les couloirs de bureaux".Comme on peut le constater sur la vidéo ci-dessus, le drone reproduit leur manière de circuler. Il a pu apprendre les règles de circulation et de sécurité et peut donc éviter d'aller en sens inverse mais aussi s'arrêter s'il rencontre un obstacle de type piétons ou autres véhicules. Davide Scaramuzza, Professeur de Robotique et de Perception à l’UZH précise :
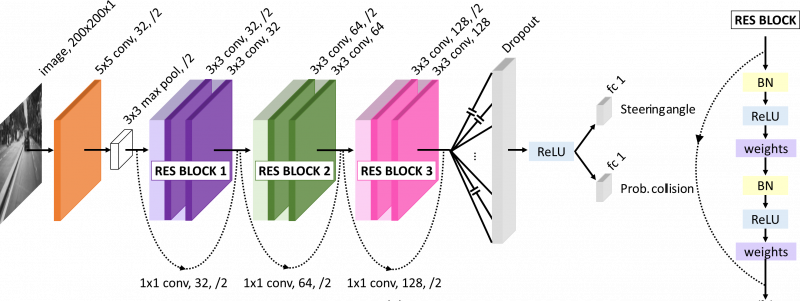
"DroNet reconnaît les obstacles statiques et dynamiques et peut ralentir pour éviter de tomber dessus. Cet algorithme nous permet de faire un pas en avant vers l'intégration des drones autonomes dans notre quotidien".L'appareil est doté de caméras comme celles que l'on trouve sur un smartphone. Le réseau de DroNet comporte 8 couches et produit 2 outputs pour chaque image en input ce qui permet de donner au drone un angle de braquage pour éviter les obstacle et de fournir au drone un probabilité de collision pour qu'il puisse identifier les situations à risque et réagir. [caption id="attachment_4107" align="aligncenter" width="800"]
UZH[/caption]
Source: A.Loquercio, A.I. Maqueda, C.R. Del Blanco, D. Scaramuzza "DroNet: Learning to Fly By Driving IEEE Robotics and Automation Letters" (RA-L), 2018 PDF: ici
Site du projet, logiciel et datasets: http://rpg.ifi.uzh.ch/dronet.html
Recherches sur le deep learning: ici