
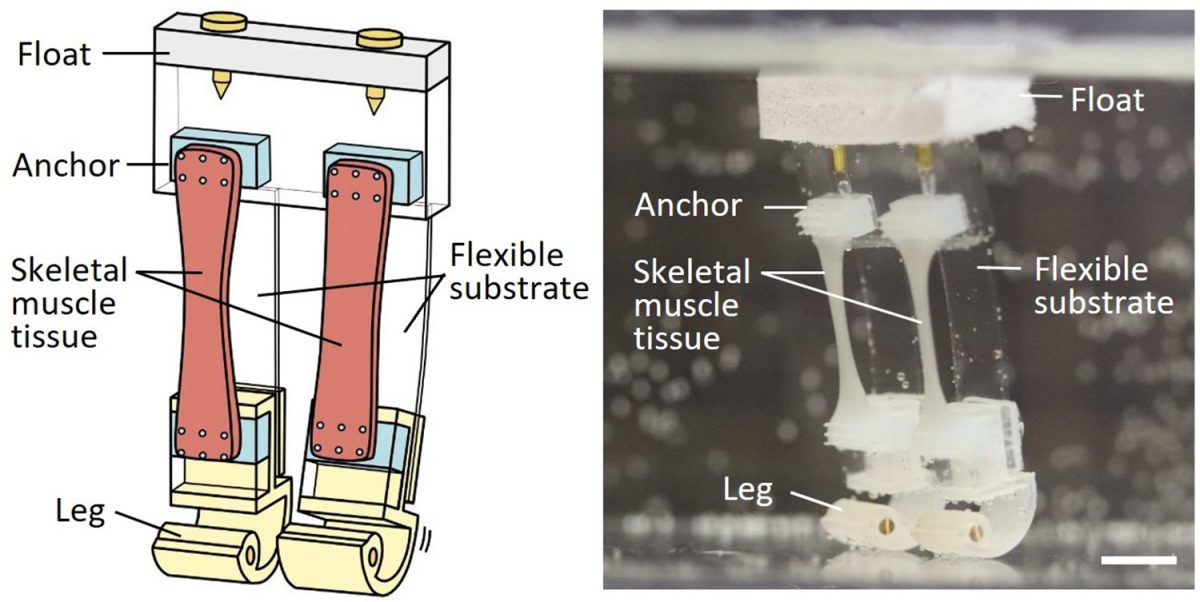
 Illustration étiquetée et image du robot. Ces images étiquetées montrent le corps flexible du robot, fabriqué à partir de tissu musculaire squelettique et d’un substrat en silicone transparent et flexible, attaché aux jambes et aux pieds lestés imprimés en 3D. ©2024, Kinjo et al/ Matière[/caption]
Le Pr Takeuchi commente :
Illustration étiquetée et image du robot. Ces images étiquetées montrent le corps flexible du robot, fabriqué à partir de tissu musculaire squelettique et d’un substrat en silicone transparent et flexible, attaché aux jambes et aux pieds lestés imprimés en 3D. ©2024, Kinjo et al/ Matière[/caption]
Le Pr Takeuchi commente :
"En incorporant des tissus vivants dans le cadre d’un robot, nous pouvons utiliser les fonctions supérieures des organismes vivants. Dans nos dernières recherches, nous avons combiné du tissu musculaire squelettique cultivé en laboratoire avec des jambes artificielles flexibles et des pieds imprimés en 3D. L’utilisation du tissu musculaire pour bouger les jambes nous a permis de créer un petit robot avec des mouvements efficaces et silencieux et un toucher doux".
Les chercheurs stimulent manuellement chaque jambe du robot à l'aide d'électrodes en or, simulant ainsi les signaux électriques du cerveau pour induire la contraction du tissu musculaire. Cette stimulation, effectuée à des intervalles de cinq secondes, permet au robot de se déplacer à une vitesse de 5,4 millimètres par minute. Bien que cette vitesse puisse sembler modeste, les mouvements de jambes du robot sont comparables à ceux d'autres robots biohybrides, démontrant ainsi son efficacité dans la locomotion. Le Pr Takeuchi explique :"Au départ, nous n’étions pas du tout sûrs qu’il était possible de marcher bipède, c’était donc vraiment surprenant quand nous avons réussi. Notre robot biohybride a réussi à effectuer des mouvements vers l’avant et vers l’arrière avec une marche bipède en équilibrant efficacement quatre forces clés : la force contractile musculaire, la force réparatrice du corps flexible, la gravité agissant sur le poids et la flottabilité du flotteur".
[caption id="" align="alignnone" width="600"] GIF d’un robot qui marche. Ce GIF accéléré du robot sous l’eau montre les jambes marchant vers l’avant, les contractions musculaires étant stimulées par l’électricité. ©2024, Kinjo et al/ Matière[/caption]
Bien que le robot soit actuellement limité à un fonctionnement sous l'eau en raison de la sensibilité du muscle cultivé à la déshydratation, les chercheurs envisagent des améliorations futures pour permettre une utilisation sur terre. Des muscles plus épais, dotés de leurs propres réserves de nutriments, pourraient être la clé pour surmonter cette limitation, ouvrant ainsi la voie à une utilisation plus étendue de ces robots dans divers environnements.
Le Pr Takeuchi conclut :
GIF d’un robot qui marche. Ce GIF accéléré du robot sous l’eau montre les jambes marchant vers l’avant, les contractions musculaires étant stimulées par l’électricité. ©2024, Kinjo et al/ Matière[/caption]
Bien que le robot soit actuellement limité à un fonctionnement sous l'eau en raison de la sensibilité du muscle cultivé à la déshydratation, les chercheurs envisagent des améliorations futures pour permettre une utilisation sur terre. Des muscles plus épais, dotés de leurs propres réserves de nutriments, pourraient être la clé pour surmonter cette limitation, ouvrant ainsi la voie à une utilisation plus étendue de ces robots dans divers environnements.
Le Pr Takeuchi conclut :
"Nos résultats offrent des informations précieuses pour l’avancement des robots souples et flexibles alimentés par des tissus musculaires et ont le potentiel de contribuer à une compréhension plus approfondie des mécanismes de locomotion biologique, nous permettant d’imiter davantage les subtilités de la marche humaine dans les robots".
Références : "Robot bipède biohybride alimenté par le tissu musculaire squelettique", Matter : 26 janvier 2024, doi :10.1016/j.matt.2023.12.035. Auteurs : Ryuki Kinjo, Yuya Morimoto, Byeongwook Jo, Shoji Takeuchi.