
L'apprentissage par imitation à partir de démonstrations humaines a ouvert la voie à des performances impressionnantes en robotique, mais la plupart des résultats se concentrent sur la manipulation sur table, n'ayant ni la mobilité ni la dextérité essentielles pour des applications réelles. Trois étudiants de Stanford, Zipeng Fu, Tony Z. Zhao, et Chelsea Finn ont développé Mobile ALOHA, un système novateur qui étend la capacité de manipulation à des tâches mobiles nécessitant un contrôle de l'ensemble du corps, capable d'effectuer de manière autonome des tâches ménagères complexes.
Mobile ALOHA hérite des avantages du système ALOHA d'origine, auquel Tony Z. Zhao et Chelsea Finn avaient contribué, notamment son faible coût et sa dextérité. Les chercheurs ont complété la configuration bimanuelle par une interface de téléopération pour l'ensemble du corps et ajouté une base mobile, une batterie de 1,26 kWh pesant 14 kg à la base, servant également de contrepoids pour éviter les basculements. Le calcul lors de la collecte de données et de l'inférence est effectué sur un ordinateur portable grand public. Selon les chercheurs, son coût de revient est de 32 000 $.
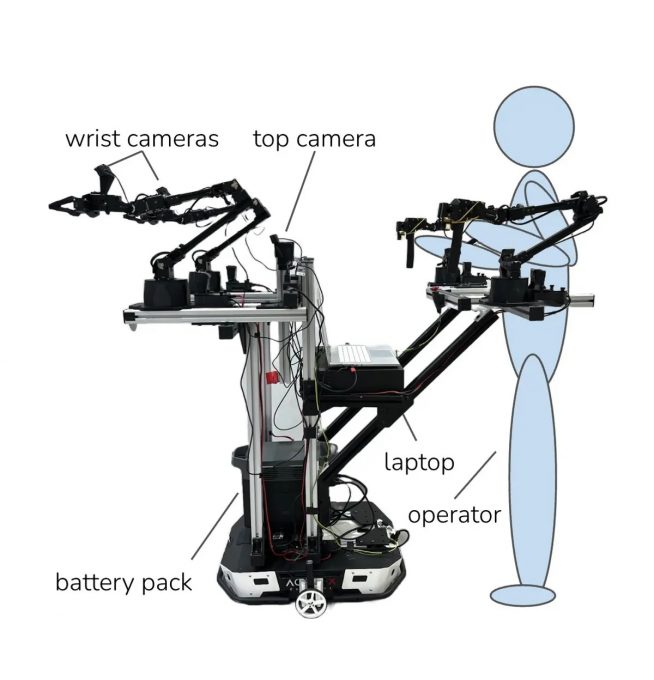 L'interface de téléopération permet à l'opérateur de contrôler non seulement les bras du robot, mais également sa base mobile, étendant la capacité du robot à se déplacer dans l'environnement, ce qui est crucial pour les tâches de manipulation mobiles.
[embed]https://mobile-aloha.github.io/resources/mobile-aloha.mp4[/embed]
Les données recueillies lors de la téléopération et les ensembles de données ALOHA statiques existants permettent d'entraîner le robot à exécuter diverses tâches de manipulation mobiles complexes. Avec seulement 50 démonstrations pour chaque tâche, cette co-formation permet d'augmenter les taux de réussite jusqu'à 90%.
Le robot peut ainsi effectuer diverses tâches de manière autonome : faire sauter et servir un morceau de crevette, ouvrir une armoire murale à deux portes pour ranger les casseroles lourdes, appeler et entrer dans un ascenseur, rincer une casserole usagée à l’aide d’un robinet de cuisine, remettre des chaises en place.
[embed]https://youtu.be/fiAoD2wgH0k[/embed]
Il n'est cependant pas infaillible...
[embed]https://youtu.be/xGNNW6smDPQ[/embed]
L'équipe lui reconnait des limitations qu'elle cherchera à réduire dans des travaux ultérieurs : l'empreinte actuelle de 90 cm x 135 cm, la hauteur fixe des deux bras suiveurs rendant difficile l'accès aux armoires inférieures, aux fours et aux lave-vaisselle, l'apprentissage par imitation qui ne permet pas au robot de s'améliorer de manière autonome ni d'explorer pour acquérir de nouvelles compétences.
Références de l'article : "Mobile ALOHA: Learning Bimanual Mobile Manipulation with Low-Cost Whole-Body Teleoperation", arXiv (2024). DOI: 10.48550/arxiv.2401.02117
Auteurs : Zipeng Fu, Tony Z. Zhao, Chelsea Finn, Université de Stanford
L'interface de téléopération permet à l'opérateur de contrôler non seulement les bras du robot, mais également sa base mobile, étendant la capacité du robot à se déplacer dans l'environnement, ce qui est crucial pour les tâches de manipulation mobiles.
[embed]https://mobile-aloha.github.io/resources/mobile-aloha.mp4[/embed]
Les données recueillies lors de la téléopération et les ensembles de données ALOHA statiques existants permettent d'entraîner le robot à exécuter diverses tâches de manipulation mobiles complexes. Avec seulement 50 démonstrations pour chaque tâche, cette co-formation permet d'augmenter les taux de réussite jusqu'à 90%.
Le robot peut ainsi effectuer diverses tâches de manière autonome : faire sauter et servir un morceau de crevette, ouvrir une armoire murale à deux portes pour ranger les casseroles lourdes, appeler et entrer dans un ascenseur, rincer une casserole usagée à l’aide d’un robinet de cuisine, remettre des chaises en place.
[embed]https://youtu.be/fiAoD2wgH0k[/embed]
Il n'est cependant pas infaillible...
[embed]https://youtu.be/xGNNW6smDPQ[/embed]
L'équipe lui reconnait des limitations qu'elle cherchera à réduire dans des travaux ultérieurs : l'empreinte actuelle de 90 cm x 135 cm, la hauteur fixe des deux bras suiveurs rendant difficile l'accès aux armoires inférieures, aux fours et aux lave-vaisselle, l'apprentissage par imitation qui ne permet pas au robot de s'améliorer de manière autonome ni d'explorer pour acquérir de nouvelles compétences.
Références de l'article : "Mobile ALOHA: Learning Bimanual Mobile Manipulation with Low-Cost Whole-Body Teleoperation", arXiv (2024). DOI: 10.48550/arxiv.2401.02117
Auteurs : Zipeng Fu, Tony Z. Zhao, Chelsea Finn, Université de Stanford
L'interface de téléopération permet à l'opérateur de contrôler non seulement les bras du robot, mais également sa base mobile, étendant la capacité du robot à se déplacer dans l'environnement, ce qui est crucial pour les tâches de manipulation mobiles.
[embed]https://mobile-aloha.github.io/resources/mobile-aloha.mp4[/embed]
Les données recueillies lors de la téléopération et les ensembles de données ALOHA statiques existants permettent d'entraîner le robot à exécuter diverses tâches de manipulation mobiles complexes. Avec seulement 50 démonstrations pour chaque tâche, cette co-formation permet d'augmenter les taux de réussite jusqu'à 90%.
Le robot peut ainsi effectuer diverses tâches de manière autonome : faire sauter et servir un morceau de crevette, ouvrir une armoire murale à deux portes pour ranger les casseroles lourdes, appeler et entrer dans un ascenseur, rincer une casserole usagée à l’aide d’un robinet de cuisine, remettre des chaises en place.
[embed]https://youtu.be/fiAoD2wgH0k[/embed]
Il n'est cependant pas infaillible...
[embed]https://youtu.be/xGNNW6smDPQ[/embed]
L'équipe lui reconnait des limitations qu'elle cherchera à réduire dans des travaux ultérieurs : l'empreinte actuelle de 90 cm x 135 cm, la hauteur fixe des deux bras suiveurs rendant difficile l'accès aux armoires inférieures, aux fours et aux lave-vaisselle, l'apprentissage par imitation qui ne permet pas au robot de s'améliorer de manière autonome ni d'explorer pour acquérir de nouvelles compétences.
Références de l'article : "Mobile ALOHA: Learning Bimanual Mobile Manipulation with Low-Cost Whole-Body Teleoperation", arXiv (2024). DOI: 10.48550/arxiv.2401.02117
Auteurs : Zipeng Fu, Tony Z. Zhao, Chelsea Finn, Université de Stanford