TLDR : ドイツ航空宇宙センター(DLR)と宇宙航空研究開発機構(JAXA)が実施した国際ミッション「ICHIBAN」により、ISS上で2台の宇宙飛行士支援ロボットが通信し協力することに成功しました。この成果は、軌道上環境でのロボット相互作用の可能性を開き、将来の月や火星ミッションのための大きな進歩を示しています。
ドイツ航空宇宙センター(DLR)と宇宙航空研究開発機構(JAXA)は、国際協力ミッション「ICHIBAN」が成功したことを発表しました。初めて、異なる国のプログラムからの宇宙飛行士支援ロボット2台がISS上で通信し協力しました。
7月29日に完了したICHIBANミッション(日本語で「一番」)の目的の一つは、ISS上で同時かつリアルタイムで動作する複数のロボットの協調をテストすることでした。
実験に参加したロボットは、DLR、Airbus、IBMが開発したCIMONと、JAXAが設計したInt-Ball2で、それぞれ欧州のコロンバスモジュールと日本のきぼうモジュールに設置されました。
2018年に初めて展開されたCIMON(クルー・インタラクティブ・モバイル・コンパニオン)は、3Dプリントされたボールサイズの球体で、IBMのAIプラットフォームwatsonxの音声認識および認知技術によって動作します。ICHIBANミッション中、CIMONはISSでの科学操作を専門とするスイスのESAセンター、BIOTESCによって操作されました。
一方、Int-Ball2はJAXAの最初のカメラドローンの進化形で、2023年から日本のモジュールに統合され、筑波(日本)の地上制御センターが宇宙飛行士の活動を遠隔で撮影し、科学的な記録を最適化し、ISSのクルーを動員せずに済ませられます。これまで、他のロボットとのインタラクション機能は考慮されていませんでした。
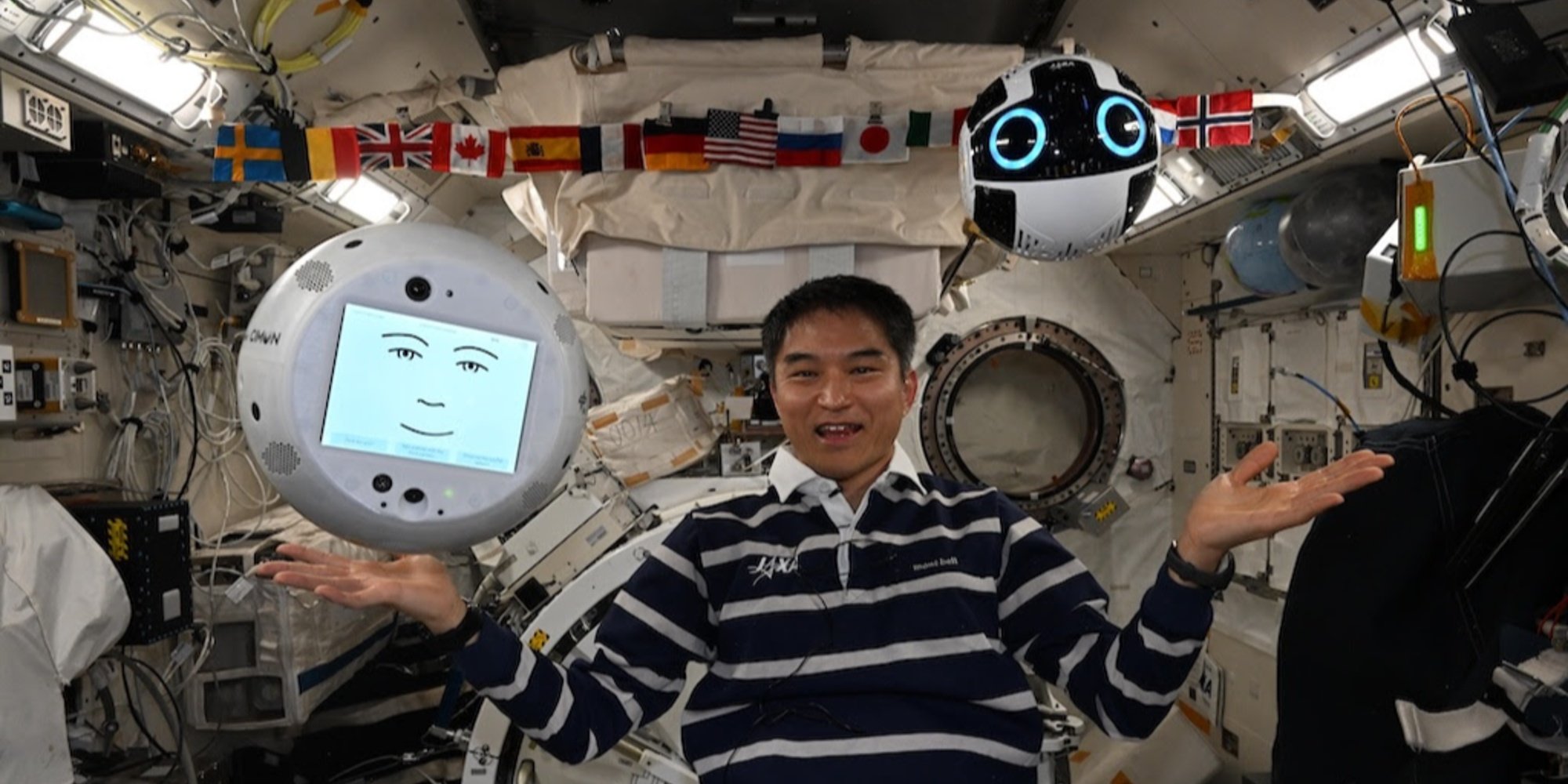
デモンストレーションは、JAXAの宇宙飛行士大西卓哉によってISSで実施されました。彼はコロンバスモジュールからCIMONに音声コマンドを送り、CIMONはインテリジェントな言語インターフェースとして機能しました。この指令はIBMのwatsonxプラットフォームによって処理され、その後Int-Ball2に操作コマンドとして翻訳されました。
Int-Ball2はきぼうモジュール内を移動し、隠された物体(ルービックキューブ、ハンマー、複数のドライバー、使用されなくなった旧型Int-Ball)を探索し、見つけ出しました。そして、CIMONの画面にライブ画像を送信し、大西が遠隔でその位置を確認できるようにしました。
クレジット:JAXA/DLR;
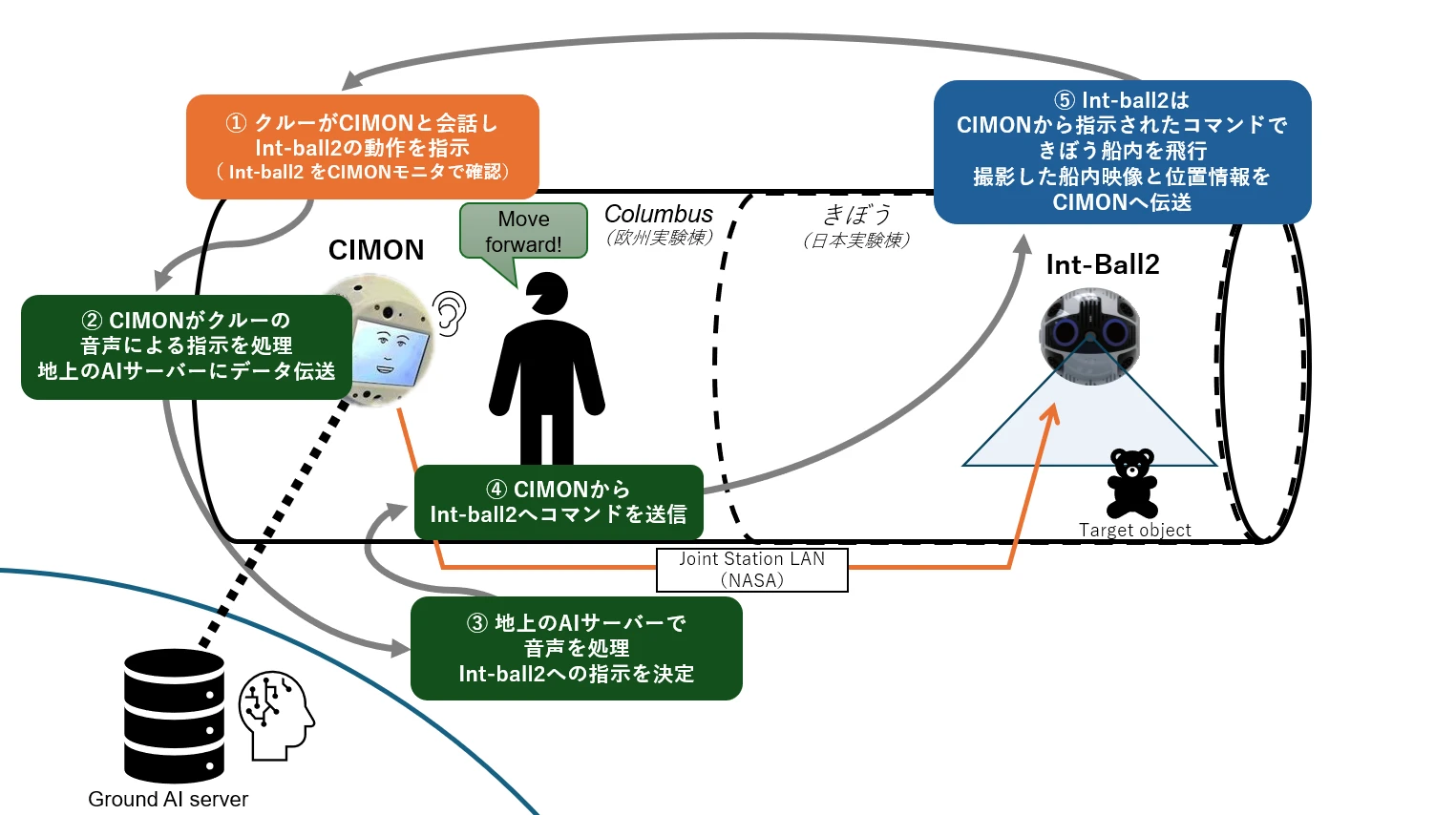
ミッションICHIBANの協力ボードのイラストレーション
ミッションICHIBANの協力ボードのイラストレーション
宇宙飛行士がCIMONに音声指令を出し、Int-Ball2がタスクを実行します(ステップ①)。CIMONはこの音声指令を地上のAIサーバーに送信し、指令の意図を分析します(ステップ②と③)。地上から指令が処理され、Joint Station LAN/NASAを通じてISSに返され、CIMONがInt-Ball2に伝達します(ステップ④)。Int-Ball2は日本の「きぼう」モジュールでタスク(例えば物体の位置特定)を実行し、画像と位置データをCIMONに返送します。
これまで、Int-Ball2によってキャプチャされた画像は筑波の制御センターにのみ送信可能でした。リアルタイムで他のロボットに送信できる可能性は、軌道上環境での分散ロボット相互作用の新たな可能性を開きます。
これは、将来の月や火星ミッションを見据えた重要な第一歩です。