Kısa : Uluslararası "ICHIBAN" misyonu, Alman uzay ajansı (DLR) ve Japon uzay araştırma ajansı (JAXA) tarafından yönetilen, ISS'deki astronot yardım robotlarının iletişim ve işbirliğini sağladı. Bu başarı, yörüngesel ortamda robotik etkileşimler için yeni ufuklar açarak, gelecekteki Ay ve Mars misyonları için önemli bir adım olarak görülüyor.
Alman uzay ajansı (DLR) ve Japonya Uzay Araştırma Ajansı (JAXA), uluslararası işbirliği misyonu "ICHIBAN"ın başarıyla tamamlandığını duyurdu. İlk kez, farklı ulusal programlardan gelen iki astronot yardım robotu, ISS'de yörüngede iletişim kurup işbirliği yaptı.
29 Temmuz'da tamamlanan ICHIBAN misyonunun (Japonca'da birinci anlamına gelir) hedeflerinden biri, ISS'de eşzamanlı ve gerçek zamanlı olarak çalışan birden fazla farklı robotun koordinasyonunu test etmekti.
Deneyde yer alan iki robot, DLR, Airbus ve IBM tarafından geliştirilen CIMON ve JAXA tarafından tasarlanan Int-Ball2 olup, sırasıyla Avrupa'nın Columbus ve Japonya'nın Kibo deney modüllerine yerleştirilmiştir.
İlk kez 2018 yılında konuşlandırılan CIMON (Crew Interactive Mobile Companion), bir top büyüklüğünde, 3D baskılı, IBM'in watsonx AI platformunun sesli ve bilişsel teknolojileriyle çalışan küresel bir robottur. ICHIBAN misyonu sırasında, CIMON, ESA'nın İsviçre'deki bilimsel operasyonlar merkezi BIOTESC tarafından işletildi.
Int-Ball2 ise JAXA'nın ilk kamera drone'unun bir evrimidir. 2023'ten beri Japon modülüne entegre edilmiş olup, Tsukuba'daki yer kontrol merkezi aracılığıyla astronotların aktivitelerini uzaktan filme alarak, bilimsel dokümantasyonu optimize ederken, Uluslararası Uzay İstasyonu mürettebatını serbest bırakır. Şimdiye kadar, başka robotlarla etkileşim kapasitesi düşünülmemişti.
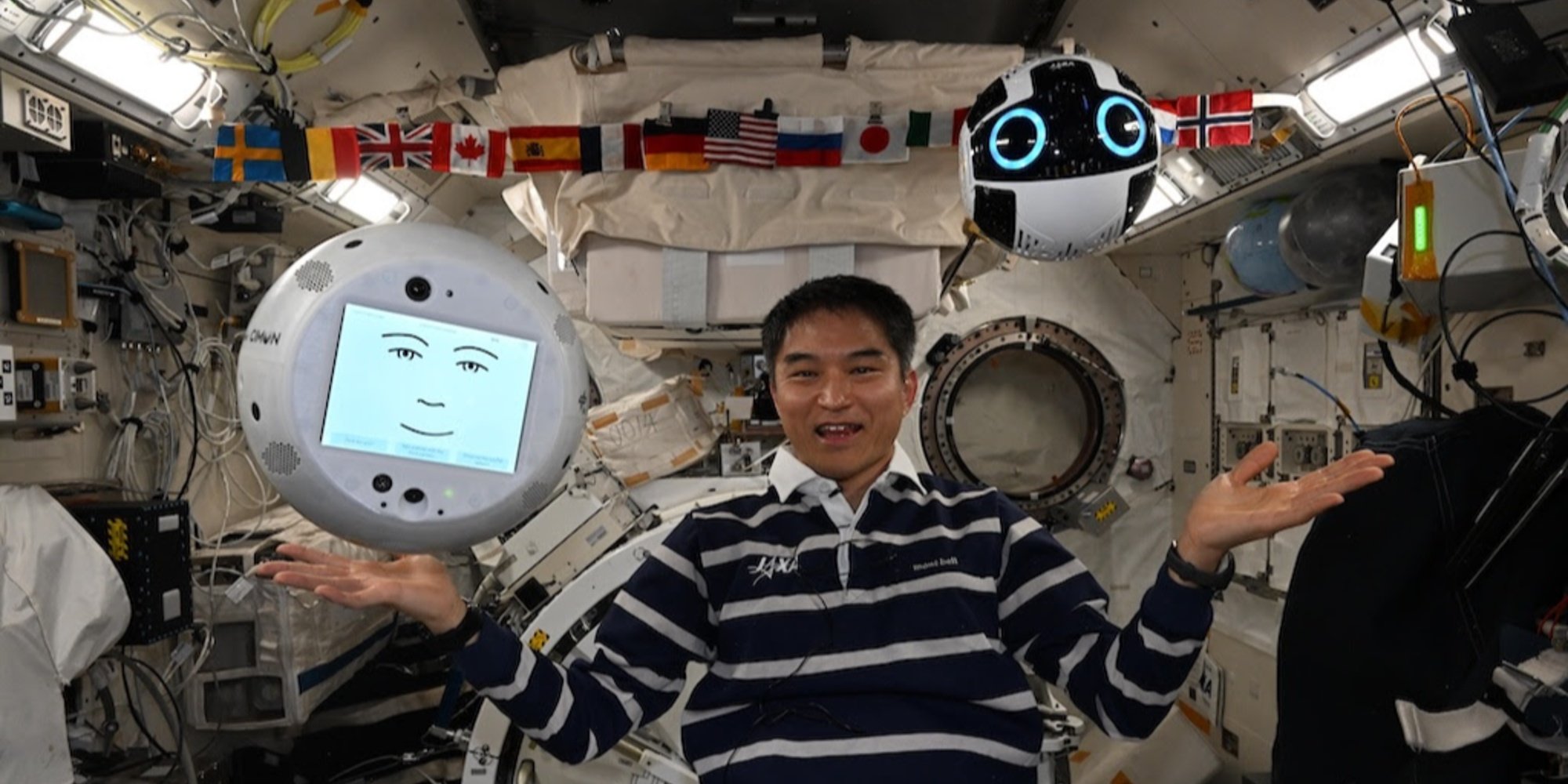
Demonstrasyon, ISS'de JAXA astronotu Takuya Onishi tarafından yönetildi. Columbus modülünden CIMON'a sesli komutlar iletti ve CIMON, akıllı bir dil arayüzü olarak hizmet etti. Talimat, IBM'in watsonx platformu tarafından işlenip, Int-Ball2'ye iletilen operasyonel komutlara çevrildi.
Int-Ball2 daha sonra Kibo modülünde dolaşarak çeşitli saklı nesneleri arayıp buldu: bir Rubik Küpü, bir çekiç, birkaç tornavida ve hizmet dışı bırakılmış eski bir Int-Ball versiyonu. Daha sonra bu görüntüleri canlı olarak CIMON'un ekranına aktardı, böylece Onishi nesnelerin yerini uzaktan görsel olarak doğrulayabildi.
Kaynak: JAXA/DLR;
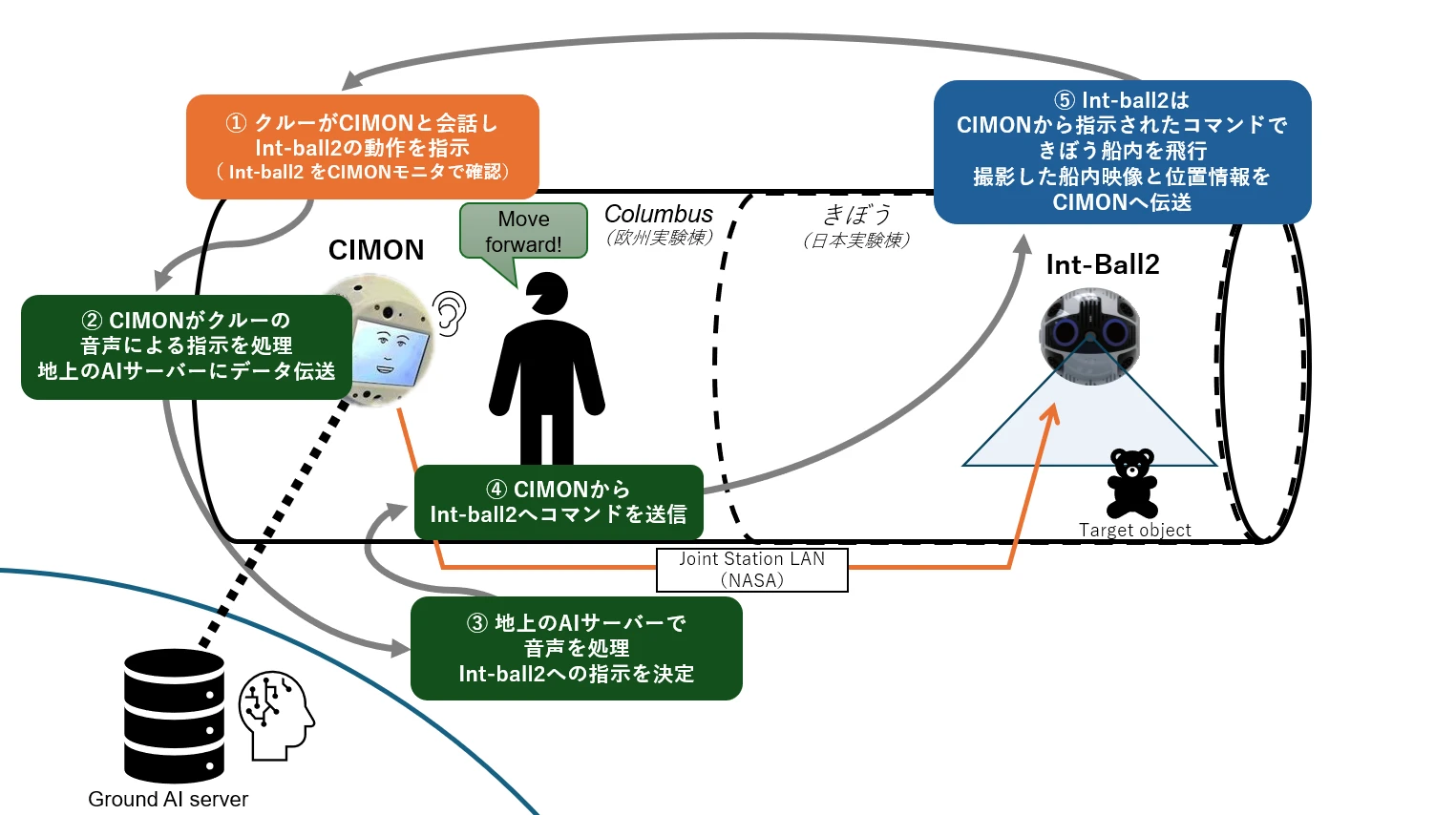
ICHIBAN misyonu işbirliği tablosu illüstrasyonu
ICHIBAN misyonu işbirliği tablosu illüstrasyonu
Astronot, Int-Ball2'nin bir görevi yerine getirmesi için CIMON'a sesli bir talimat verir (aşama ①). CIMON, bu sesli komutu, komutun amacını analiz eden yer tabanlı bir AI sunucusuna iletir (aşamalar ② ve ③). ISS'ye talimat geri döner: işlem tamamlandığında, komut yeryüzünden LAN üzerinden (Joint Station LAN/NASA) CIMON'a gönderilir ve CIMON, Int-Ball2'ye iletir (aşama ④). Int-Ball2, Japon "Kibo" modülünde görevi yerine getirir (örneğin bir nesneyi bulur) ve görüntüleri ve konum verilerini CIMON'a geri gönderir.
Yenilik, şu ana kadar Int-Ball2 tarafından çekilen görüntülerin yalnızca Tsukuba kontrol merkezine iletilebilmesi ile ilgiliydi. Bunların gerçek zamanlı olarak aynı gemideki başka bir robota gönderilebilmesi, yörüngesel ortamda dağıtılmış robotik etkileşimler için yeni bir alan açıyor.
Gelecekteki Ay ve Mars misyonları ışığında önem kazanan bir ilk adım.