TLDR : 독일항공우주센터(DLR)와 일본우주항공연구개발기구(JAXA)가 주도한 국제 미션 'ICHIBAN'은 ISS에서 우주비행사 지원 로봇 두 대의 통신 및 협력을 성공적으로 달성했습니다. 이는 궤도 환경에서의 로봇 상호작용에 새로운 가능성을 열었으며, 향후 달 및 화성 임무를 위한 중요한 진전입니다.
독일항공우주센터(DLR)와 일본우주항공연구개발기구(JAXA)는 국제 협력 임무 'ICHIBAN'이 성공적으로 완료되었다고 발표했습니다. 이번 임무에서 처음으로 서로 다른 국가 프로그램에서 개발된 두 개의 우주비행사 지원 로봇이 ISS 궤도에서 통신하고 협력했습니다.
지난 7월 29일에 종료된 ICHIBAN 임무의 목표 중 하나는 ISS에서 실시간으로 여러 로봇이 동시에 작동하며 상호 조정되는 능력을 시험하는 것이었습니다.
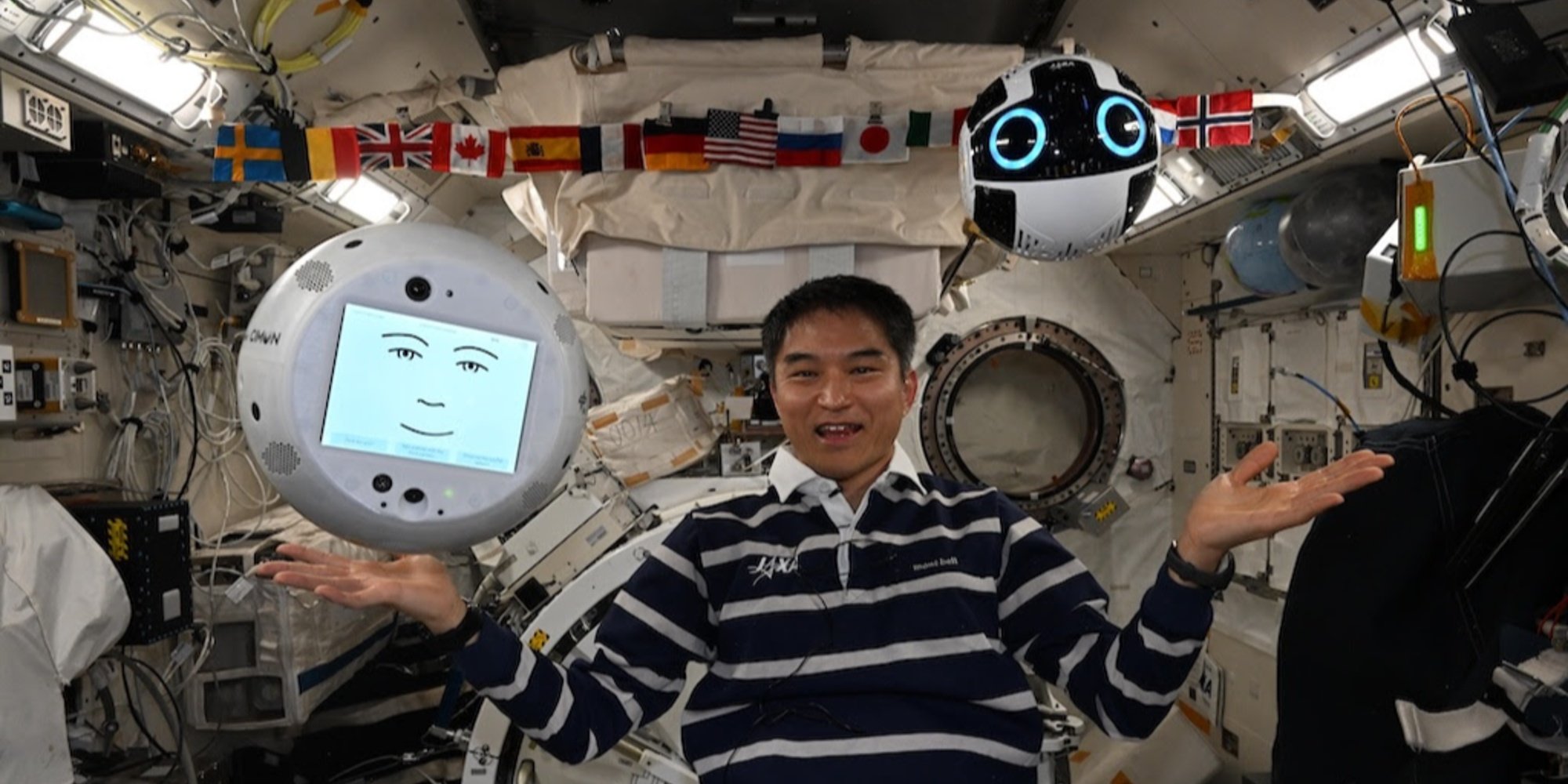
실험에 참여한 두 로봇은 DLR, Airbus, IBM이 개발한 CIMON과 JAXA가 설계한 Int-Ball2로, 각각 유럽의 Columbus 모듈과 일본의 Kibo 모듈에 설치되었습니다.
2018년에 처음 배치된 CIMON(Crew Interactive Mobile Companion)은 3D로 인쇄된 공 크기의 구형 로봇으로, IBM의 AI 플랫폼 watsonx의 음성 및 인지 기술로 구동됩니다. ICHIBAN 임무 동안 CIMON은 국제 우주 정거장에서의 과학 작업을 전문으로 하는 ESA의 스위스 센터 BIOTESC에 의해 운영되었습니다.
반면 Int-Ball2는 JAXA의 첫 번째 카메라 드론의 발전된 버전으로, 2023년부터 일본 모듈에 통합되어, 일본 츠쿠바에 있는 지상 통제 센터에서 우주비행사의 활동을 원격 촬영할 수 있게 하여 우주 정거장 승무원의 개입 없이 과학 문서화를 최적화합니다. 지금까지 다른 로봇과의 상호작용 능력은 고려되지 않았습니다.
실험은 ISS에 탑승한 JAXA의 우주비행사 오니시 타쿠야에 의해 수행되었습니다. 콜럼버스 모듈에서 그는 CIMON에게 음성 명령을 전달했으며, CIMON은 지능형 언어 인터페이스 역할을 했습니다. 명령은 IBM의 watsonx 플랫폼에 의해 처리되어, Int-Ball2에 작동 명령으로 번역되었습니다.
이후 Int-Ball2는 Kibo 모듈 내를 탐색하여 숨겨진 여러 가지 물체들을 찾고 위치를 확인했습니다: 루빅스 큐브, 망치, 여러 개의 드라이버, 그리고 사용 중지된 Int-Ball의 이전 버전 등이었습니다. 그런 다음 실시간으로 CIMON 화면에 이미지를 전송하여 오니시가 원격으로 위치를 시각적으로 확인할 수 있게 했습니다.
크레딧: JAXA/DLR;
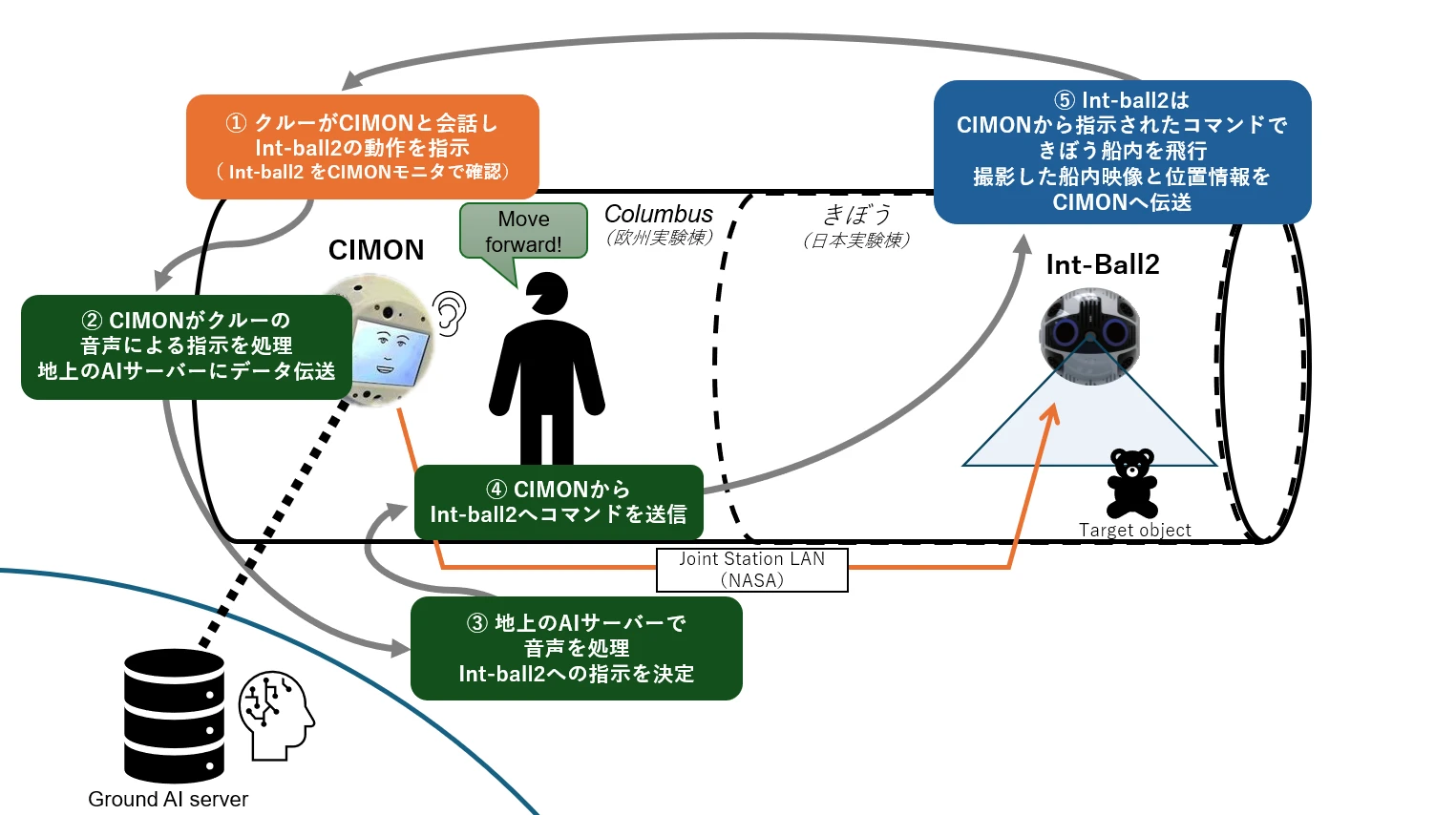
미션 ICHIBAN 협력 테이블 일러스트레이션
미션 ICHIBAN 협력 테이블 일러스트레이션
우주비행사가 CIMON에 음성 명령을 내려 Int-Ball2가 작업을 수행하도록 지시합니다 (단계 ①). CIMON은 이 음성 명령을 지상의 AI 서버에 전달하여 명령의 의도를 분석합니다 (단계 ② 및 ③). ISS로의 명령 반환: 처리된 명령은 지상에서 스테이션 LAN(NASA)으로 CIMON에 전송되고, 이는 Int-Ball2에 전달됩니다 (단계 ④). Int-Ball2는 일본 모듈 'Kibo'에서 작업을 수행하고(예: 물체 찾기), 이미지를 CIMON에 반환합니다.
Int-Ball2가 캡처한 이미지는 지금까지 츠쿠바의 통제 센터에만 전송될 수 있었습니다. 이를 다른 로봇에 실시간으로 전송할 수 있는 능력은 궤도 환경에서의 분산 로봇 상호작용을 위한 새로운 가능성을 열어줍니다.
향후 달 및 화성 임무에서 중요한 첫걸음이 될 것입니다.