TLDR : المهمة الدولية "ICHIBAN" التي نفذتها وكالة الفضاء الألمانية (DLR) ووكالة الفضاء اليابانية (JAXA) نجحت في تمكين التواصل والتعاون بين روبوتين مساعديين لرواد الفضاء على متن ISS. هذا الإنجاز، الذي يفتح آفاقاً للتفاعل الروبوتي في البيئة المدارية، يمثل تقدمًا كبيرًا في ضوء المهمات القمرية والمريخية المستقبلية.
أعلنت وكالة الفضاء الألمانية (DLR) ووكالة الفضاء اليابانية JAXA أن مهمة التعاون الدولي "ICHIBAN" قد تكللت بالنجاح. لأول مرة، تمكّن روبوتان مساعدان لرواد الفضاء من برامج وطنية منفصلة من التواصل والتعاون في المدار على متن ISS.
كان أحد أهداف مهمة ICHIBAN (الأولى باليابانية)، التي انتهت في 29 يوليو الماضي، هو اختبار التنسيق بين عدة روبوتات متميزة تعمل في الوقت نفسه وفي الوقت الحقيقي على متن ISS.
الروبوتان المشاركان في التجربة هما CIMON، الذي طورته DLR وAirbus وIBM، وInt-Ball2 الذي صممته JAXA، وتم تثبيتهما في وحدتي التجارب الأوروبية Columbus واليابانية Kibo على التوالي.
تم نشر CIMON لأول مرة في عام 2018، وهو روبوت كروي بحجم كرة، مطبوع بتقنية ثلاثية الأبعاد، ومزود بتقنيات الصوت والذكاء الاصطناعي من منصة watsonx التابعة لـIBM. خلال مهمة ICHIBAN، تم تشغيل CIMON بواسطة BIOTESC، المركز السويسري التابع لـESA المتخصص في العمليات العلمية على متن المحطة الدولية.
من جهته، Int-Ball2 هو تطوير لأول درون كاميرا لـJAXA. تم دمجه منذ عام 2023 في الوحدة اليابانية، مما يتيح لمركز التحكم الأرضي في تسوكوبا (اليابان) تصوير أنشطة الرواد عن بُعد، مما يحسن من توثيق العمليات العلمية دون إشغال طاقم المحطة الفضائية الدولية. حتى الآن، لم تكن هناك أي قدرة على التفاعل مع روبوتات أخرى.
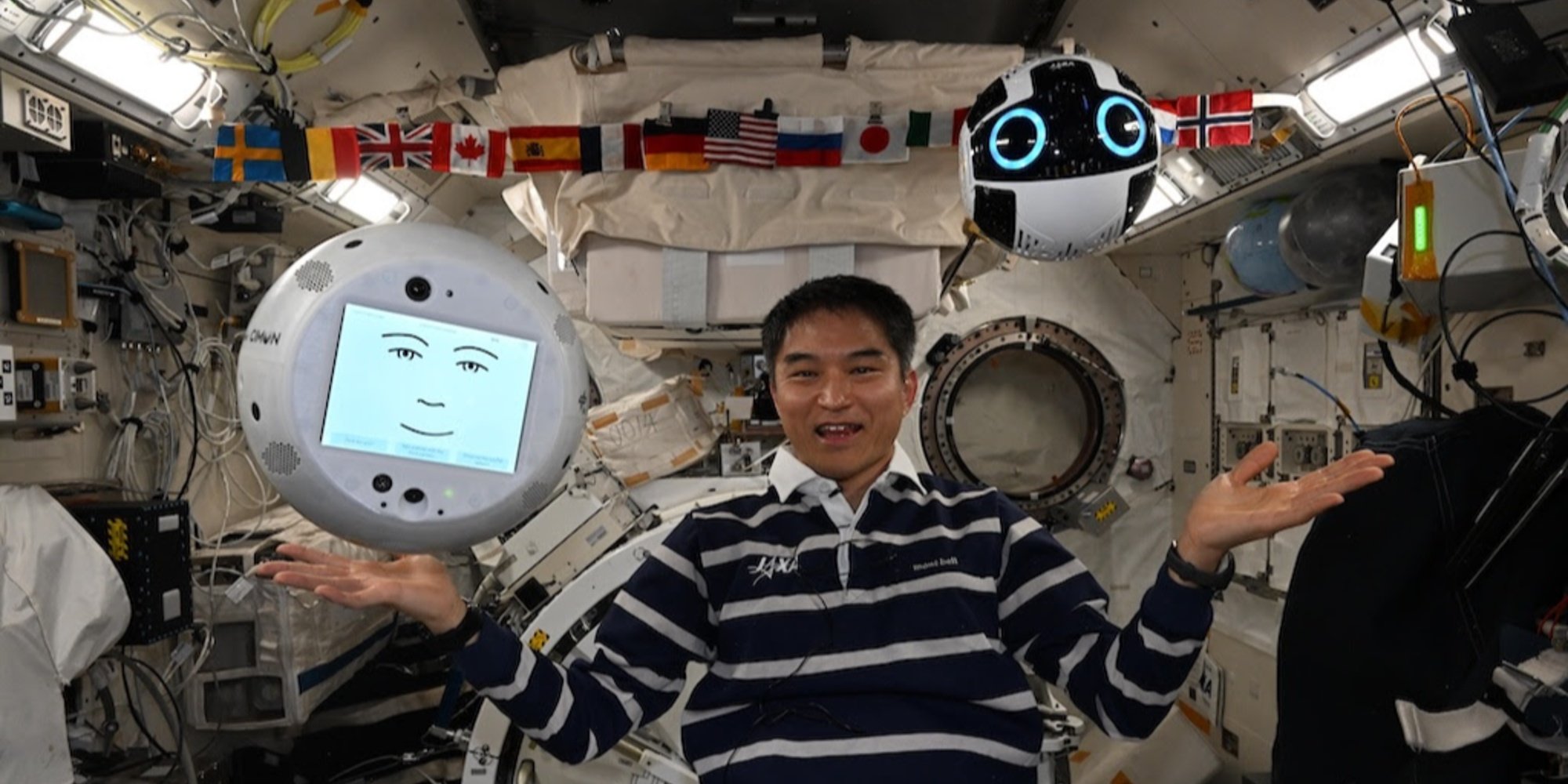
أجرى التجربة تاكويا أونشي، رائد الفضاء في JAXA على متن ISS. من وحدة Columbus، أرسل أوامر صوتية إلى CIMON، الذي عمل كواجهة لغوية ذكية. تمت معالجة الأوامر بواسطة منصة watsonx التابعة لـIBM، قبل أن تُترجم إلى أوامر تشغيلية موجهة إلى Int-Ball2.
عندها تنقل Int-Ball2 في وحدة Kibo للبحث عن وتحديد مواقع عدة أشياء مخفية: مكعب Rubik's، مطرقة، عدة مفكات، ونسخة قديمة من Int-Ball تم إيقاف تشغيلها. ثم أرسل الصور مباشرة إلى شاشة CIMON، مما أتاح لأونشي التحقق بصريًا من مواقعها عن بُعد.
الائتمان: JAXA/DLR;
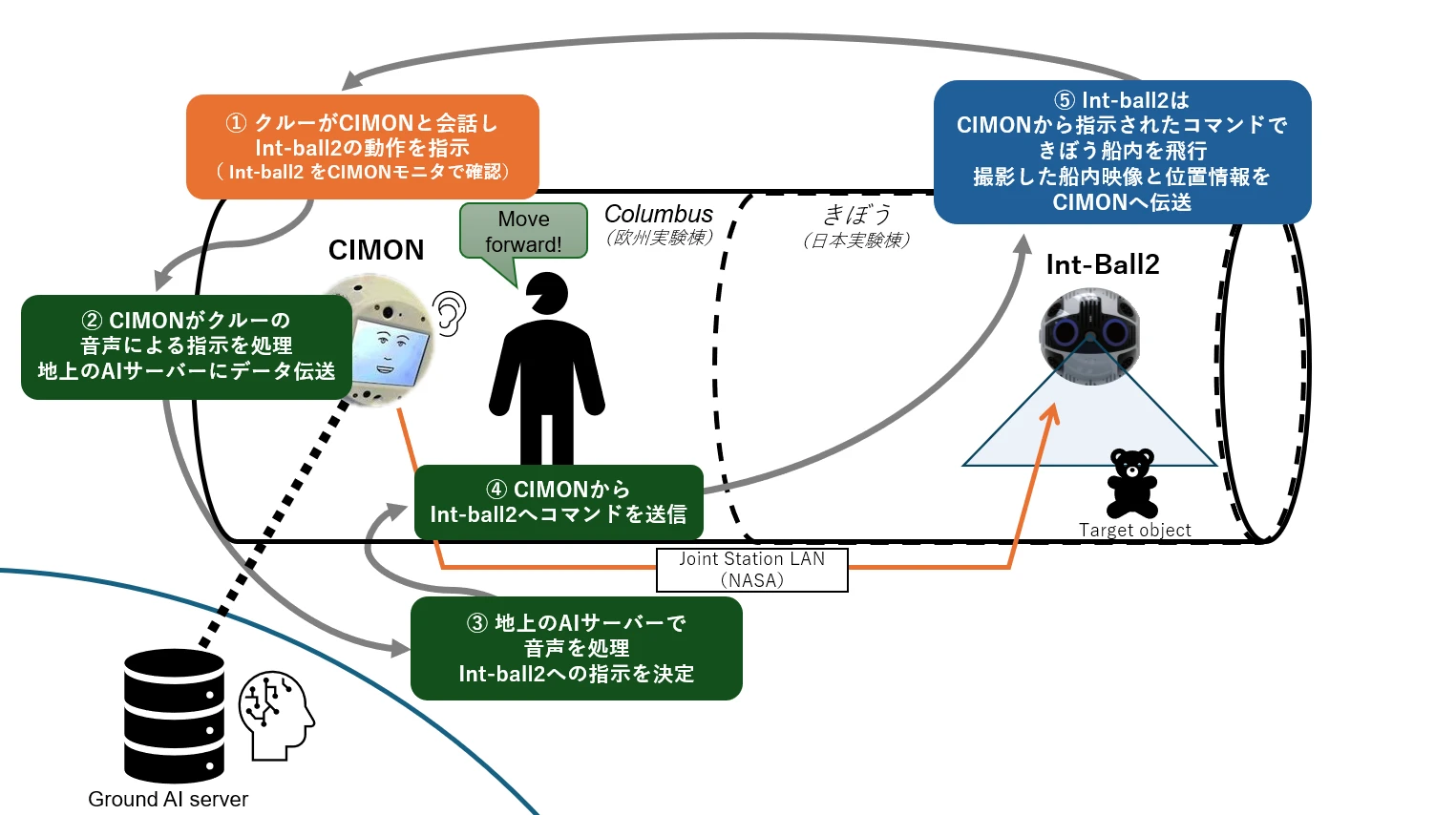
رسم توضيحي لطاولة التعاون في مهمة ICHIBAN
رسم توضيحي لطاولة التعاون في مهمة ICHIBAN
رائد الفضاء يعطي تعليمات صوتية لـCIMON ليقوم Int-Ball2 بمهمة (الخطوة ①). CIMON ينقل الأمر الصوتي إلى خادم AI على الأرض، الذي يحلل نية الأمر (الخطوات ② و③). إعادة التعليمات إلى ISS: بعد المعالجة، يتم إرسال الأمر من الأرض عبر شبكة المحطة (Joint Station LAN/NASA) إلى CIMON، الذي ينقلها إلى Int-Ball2 (الخطوة ④). يعمل Int-Ball2 وفقاً لذلك في الوحدة اليابانية "Kibo", ينفذ مهمته (مثلاً تحديد موقع شيء ما)، ثم يعيد الصور وبيانات الموقع إلى CIMON.
الابتكار يكمن في أنه حتى الآن، لم يكن يمكن إرسال الصور التي التقطها Int-Ball2 إلا إلى مركز التحكم في تسوكوبا. إمكانية إرسالها في الوقت الحقيقي إلى روبوت آخر على متن المحطة يفتح مجالاً جديداً للتفاعلات الروبوتية الموزعة في البيئة المدارية.
خطوة أولى تكتسب أهمية كبيرة في ضوء المهمات القمرية والمريخية المستقبلية.