У короткому : Міжнародна місія "ICHIBAN", проведена Німецьким космічним агентством (DLR) та Японським агентством аерокосмічних досліджень (JAXA), успішно змусила два роботи-помічники астронавтів співпрацювати на борту МКС. Ця досягнення відкриває перспективи для роботичних взаємодій в орбітальному середовищі і є важливим кроком до майбутніх місячних та марсіанських місій.
Німецьке космічне агентство (DLR) та Японське агентство аерокосмічних досліджень (JAXA) оголосили, що міжнародна коопераційна місія "ICHIBAN" була успішною. Вперше два роботи-помічники астронавтів з різних національних програм комунікували та співпрацювали на орбіті на борту МКС.
Однією з цілей місії ICHIBAN (перше японською), яка завершилася 29 липня, було тестування координації кількох різних роботів, що працюють одночасно і в реальному часі на борту МКС.
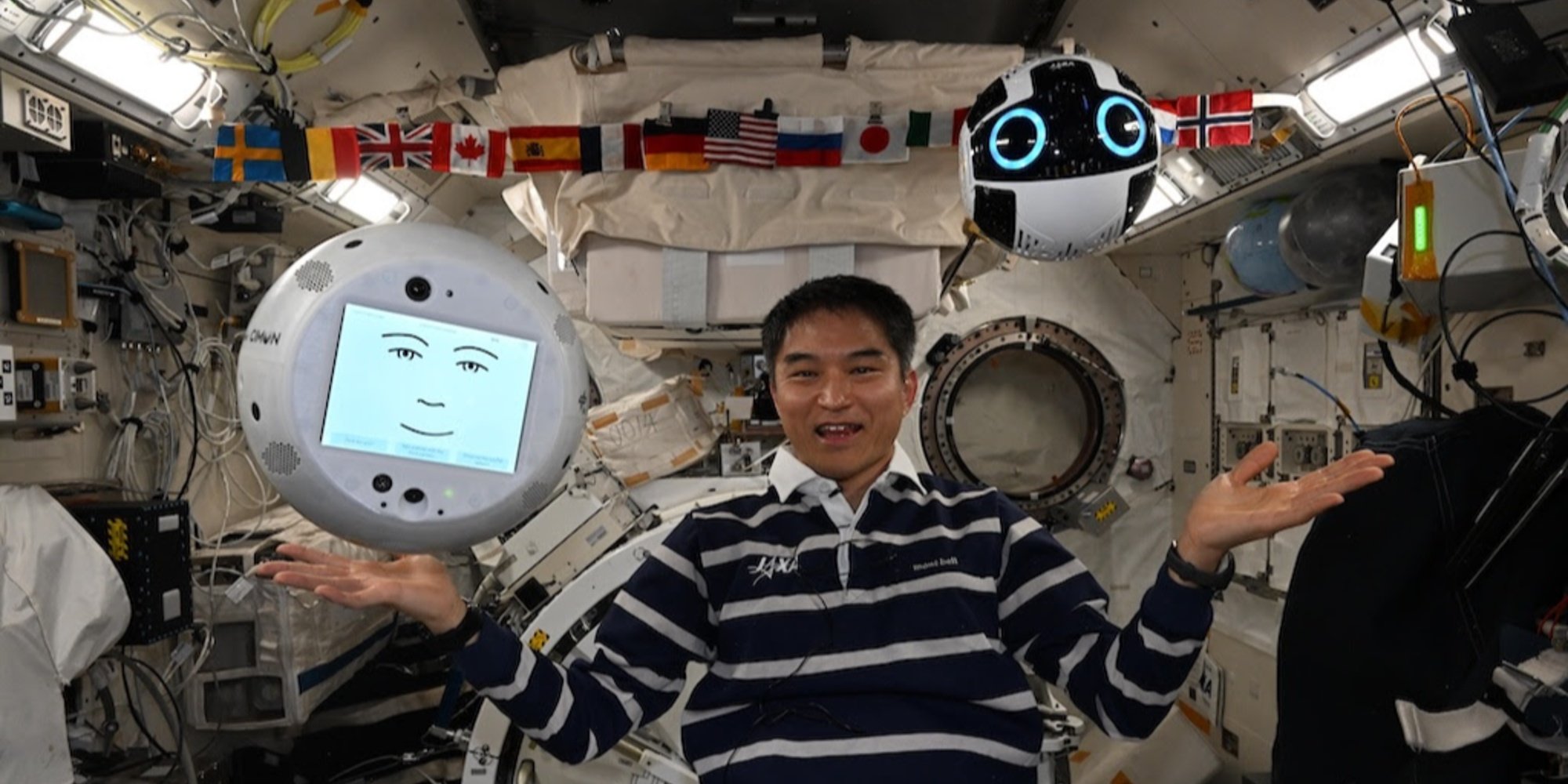
Два роботи, залучені до експерименту, це CIMON, розроблений DLR, Airbus і IBM, та Int-Ball2, створений JAXA, розміщені відповідно в європейському експериментальному модулі Columbus та японському Kibo.
Вперше розгорнутий у 2018 році, CIMON (Crew Interactive Mobile Companion) – це сферичний робот, розміром з м'яч, надрукований на 3D-принтері, що працює на голосових і когнітивних технологіях watsonx, платформи AI від IBM. Під час місії ICHIBAN, CIMON управлявся BIOTESC, швейцарським центром ESA, спеціалізованим на наукових операціях на борту міжнародної станції.
Зі свого боку, Int-Ball2 є еволюцією першого дрону-камери від JAXA. Інтегрований з 2023 року в японському модулі, він дозволяє контрольній кімнаті в Цукубі (Японія) дистанційно знімати діяльність астронавтів, оптимізуючи наукову документацію без залучення екіпажу міжнародної космічної станції. Досі жодних можливостей для взаємодії з іншими роботами не було передбачено.
Демонстрація була проведена астронавтом JAXA Такуей Оніші на борту МКС. З модуля Columbus він передав голосові команди до CIMON, який виступав як інтелектуальний мовний інтерфейс. Інструкція була оброблена платформою watsonx від IBM, перед тим як бути перетвореною на операційні команди для Int-Ball2.
Останній переміщувався в модулі Kibo, щоб шукати і локалізувати різні заховані об'єкти: кубик Рубіка, молоток, кілька викруток і стару версію Int-Ball, яка була виведена з експлуатації. Потім він передавав зображення в реальному часі на екран CIMON, що дозволяло Оніші візуально перевіряти їх розташування на відстані.
Кредит: JAXA/DLR;
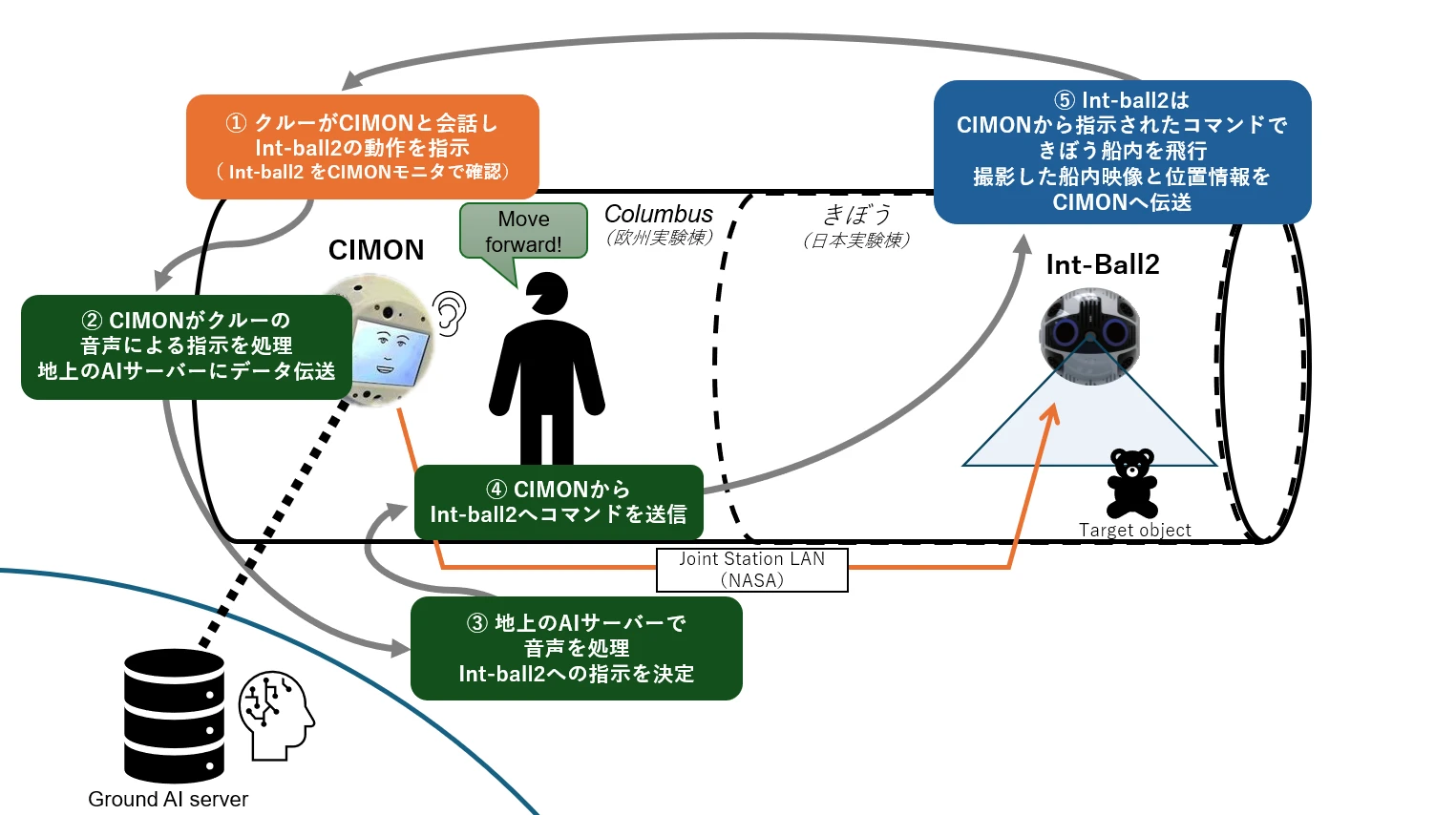
Ілюстрація таблиці співпраці місії ICHIBAN
Ілюстрація таблиці співпраці місії ICHIBAN
Астронавт дає голосову інструкцію CIMON, щоб Int-Ball2 виконав завдання (етап ①). CIMON передає цю голосову команду на сервер AI на Землі, який аналізує намір команди (етапи ② і ③). Повернення інструкцій на МКС: після обробки команда повертається з Землі через локальну мережу станції (Joint Station LAN/NASA) до CIMON, який передає її Int-Ball2 (етап ④). Останній діє відповідно в японському модулі "Kibo", виконує своє завдання (наприклад, локалізує об'єкт), а потім передає зображення та дані позиції до CIMON.
Інновація полягає в тому, що, до цього, зображення, захоплені Int-Ball2, могли бути передані лише до контрольного центру в Цукубі. Можливість їх передачі в реальному часі до іншого робота на борту відкриває нові горизонти для розподілених роботичних взаємодій в орбітальному середовищі.
Це перший крок, що набуває великого значення у світлі майбутніх місячних та марсіанських місій.