TLDR : 国际合作任务“ICHIBAN”由德国航天中心(DLR)和日本宇宙航空研究开发机构(JAXA)主导,成功实现了国际空间站上两个宇航员辅助机器人的通信与合作。这一壮举为轨道环境中的机器人交互开辟了新前景,是未来月球和火星任务的重要进展。
德国航天中心(DLR)和日本宇宙航空研究开发机构(JAXA)宣布,国际合作任务“ICHIBAN”取得圆满成功。首次,来自不同国家计划的两个宇航员辅助机器人在国际空间站上进行通信与合作。
ICHIBAN任务(在日语中意为“第一”)于7月29日完成,任务目标之一是测试多个独立机器人在国际空间站上同时实时操作的协调能力。
参与实验的两个机器人分别是由DLR、Airbus和IBM开发的CIMON,以及由JAXA设计的Int-Ball2,分别安装在欧洲哥伦布实验舱和日本“希望”实验舱中。
首次部署于2018年的CIMON(Crew Interactive Mobile Companion)是一个球形机器人,大小如同一个球,通过IBM的watsonx AI平台进行语音和认知技术驱动。在ICHIBAN任务期间,CIMON由欧洲航天局的瑞士BIOTESC中心操作,该中心专门负责国际空间站上的科学操作。
另一方面,Int-Ball2是JAXA首款相机无人机的升级版。自2023年起集成在日本模块中,它使地面控制中心(位于日本筑波)可以远程记录宇航员的活动,从而优化科学文档记录,而无需动用国际空间站的人员。在此之前,尚未计划与其他机器人进行互动能力。
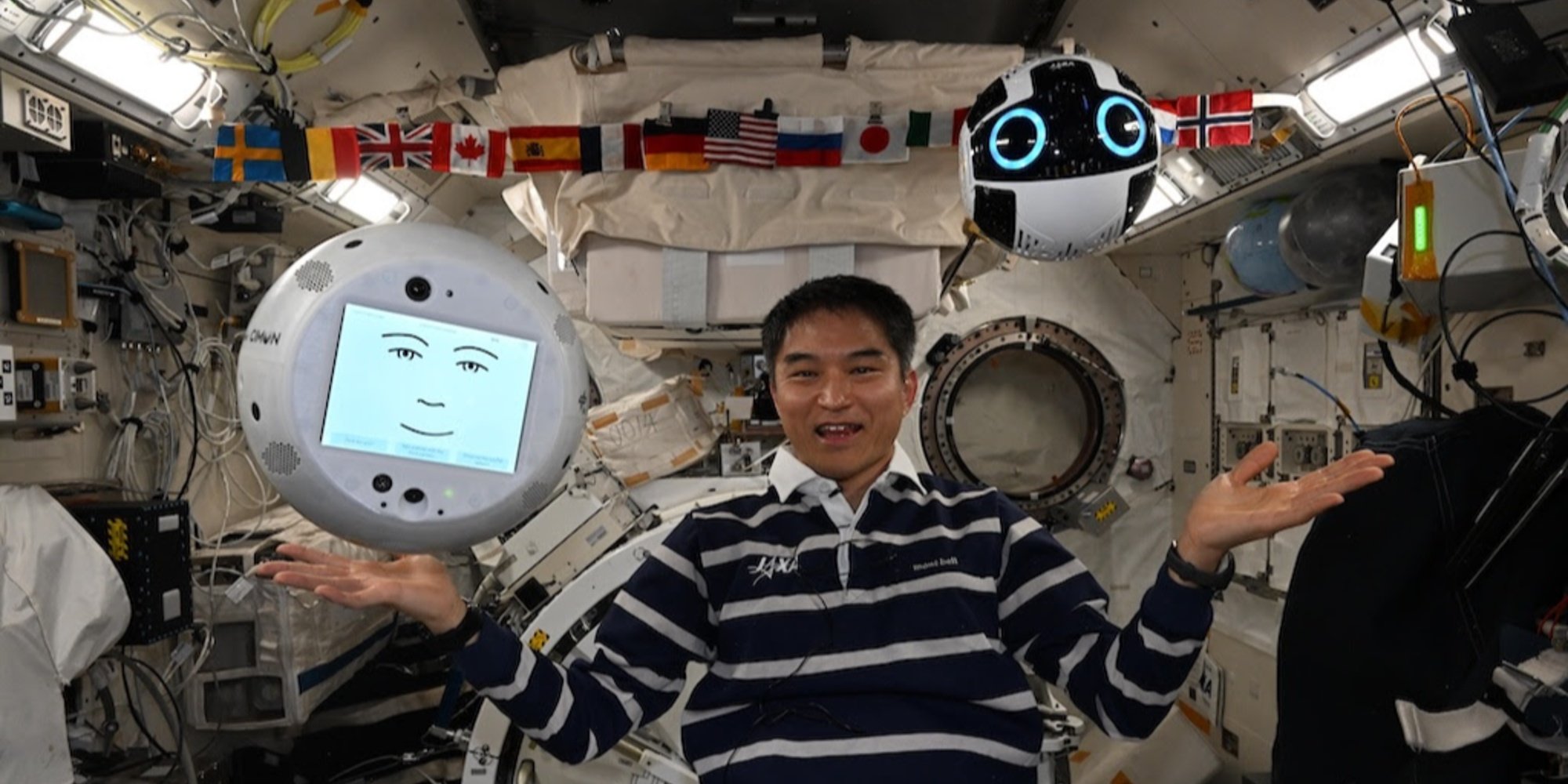
此次演示由JAXA宇航员Takuya Onishi在国际空间站上进行。在哥伦布实验舱中,他向CIMON发送语音指令,作为智能语言接口。指令由IBM的watsonx平台处理,然后被翻译成操作命令传达给Int-Ball2。
Int-Ball2随后在“希望”模块中导航以寻找和定位各种隐藏物品:如魔方、锤子、多个螺丝刀以及一台停用的旧版Int-Ball。然后,它将实时图像传输到CIMON的屏幕上,使Onishi能够远程可视化检查它们的位置。
图片来源:JAXA/DLR;
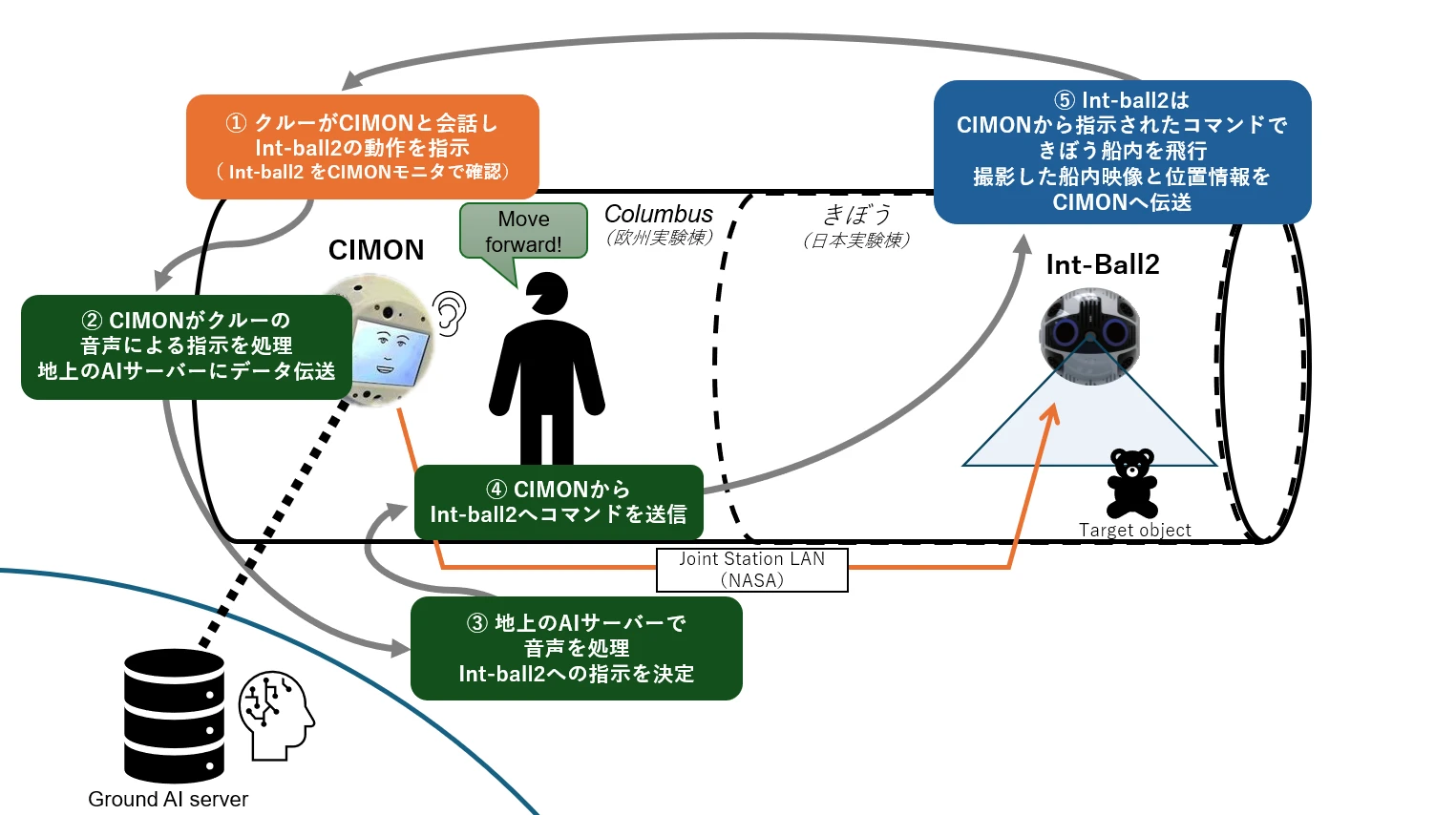
ICHIBAN任务的合作图解
ICHIBAN任务的合作图解
宇航员向CIMON发送语音指令,指示Int-Ball2执行任务(步骤①)。CIMON将此语音指令发送至地面AI服务器,该服务器分析指令意图(步骤②和③)。指令返回国际空间站:处理后,指令通过站内局域网(Joint Station LAN/NASA)从地面传回CIMON,再传达给Int-Ball2(步骤④)。Int-Ball2随后在日本“希望”模块中执行任务(例如定位物体),然后将图像和位置信息传回CIMON。
创新在于,迄今为止,Int-Ball2捕获的图像只能传输至筑波控制中心。实时传输至站内的另一个机器人为轨道环境中的分布式机器人互动开辟了新领域。
这项初步工作在未来的月球和火星任务背景下显得尤为重要。